摘要
近年来,人工智能技术的发展推动了机器人的智能化进程,清洁、配送、陪护等服务机器人给人们生活带来的便利正在普及。人类的眼睛和手臂配合可以完成复杂的抓取行为。同理,视觉传感器能帮助机器人捕获丰富的环境信息,机械臂可以完成类人的抓取任务。因此本课题基于RGB-D深度视觉和开源的ROS系统,开展移动抓取机器人的仿真环境和软硬件的设计与实现,主要分为建图导航和机械臂的识别抓取两部分。
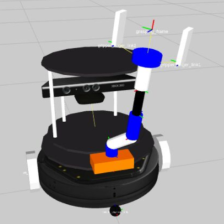
首先,基于D-H参数建立了机器人的模型并在RVIZ下可视化,基于Ros_control配置了底盘的差速控制器和机械臂的关节位置控制器,在Gazebo仿真平台建立了机器人的物理仿真模型和演示场景。
在建图导航部分,基于Kobuki底盘和Kinect v1深度相机搭建了移动导航平台,借助ROS Navigation导航框架,利用Gmapping功能包和Amcl功能包完成SLAM任务,利用Move_base功能包基于Dijkstra算法和DWA算法完成导航任务。
在识别抓取部分,在底盘上搭载了一台六自由度机械臂,Arduino UNO微处理器和PCA9685驱动作为机械臂的控制硬件,利用Find_object_3d功能包基于oFast和rBRIEF算法完成目标的识别定位,使用MoveIt配置助手通过Trac_ik插件基于牛顿收敛法和SQP方法完成了机械臂的逆运动学规划。
最后,在仿真环境下进行了综合演示实验,结合人脸身份认证和语音指令导航,机器人能够完成移动抓取任务。并且针对建图定位偏移、抓取规划不稳定等问题,提出了硬件结构和规划方法的改进方向,通过抓取改进实验减少了机械臂与场景的碰撞。
ROS机器人(仿真+实物)

模型建立及仿真场景

硬件连接及实物图

系统结构

- Simulation design and Realization of face recognition, voice control, autonomous movement, recognition and grasping robot based on ROS
- Thanks for the great work: find-object, face_recognitionand古月居
- Video:
Bilibili

